您好,歡迎來(lái)到企業(yè)庫(kù)b2b平臺(tái)網(wǎng)站 [請(qǐng)登陸] [免費(fèi)注冊(cè)]


二維碼")
版二維碼")
搜產(chǎn)品
搜企業(yè)
客服電話:13631151688
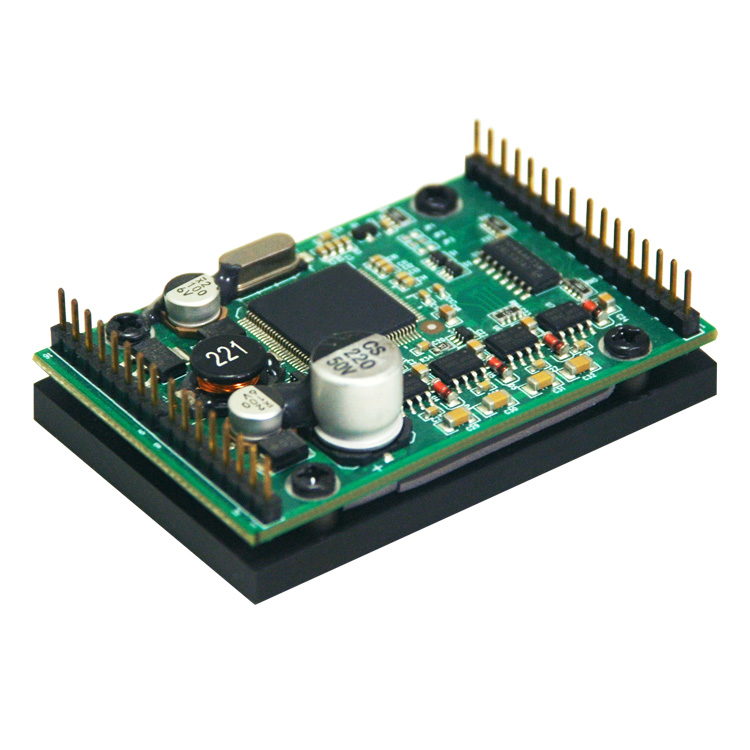
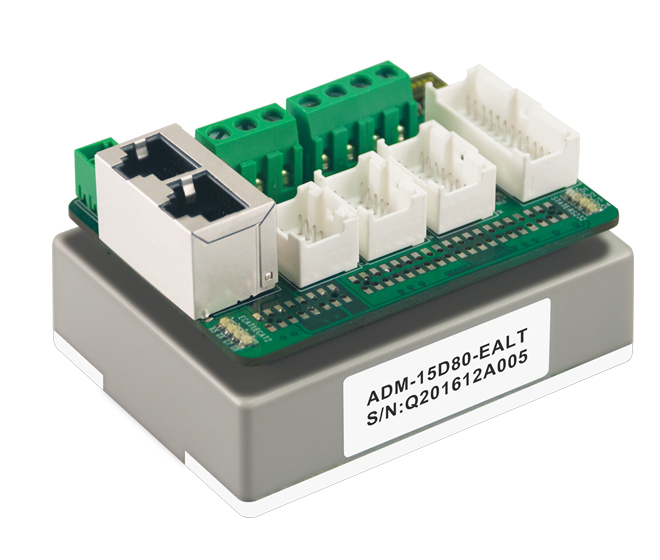
泰科智能IDM可編程直流伺服驅(qū)動(dòng)器 可脫離主機(jī)運(yùn)行")